L
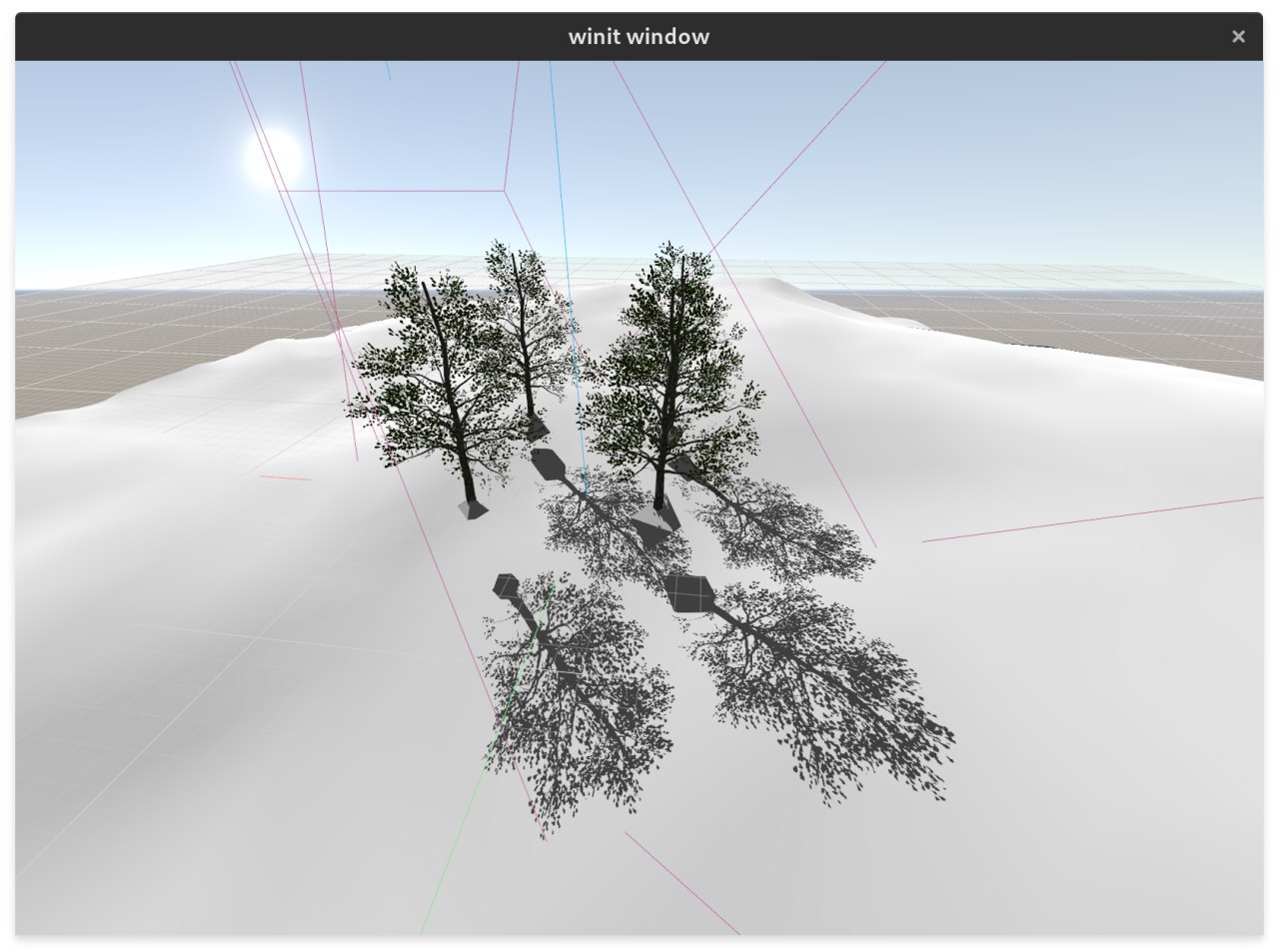
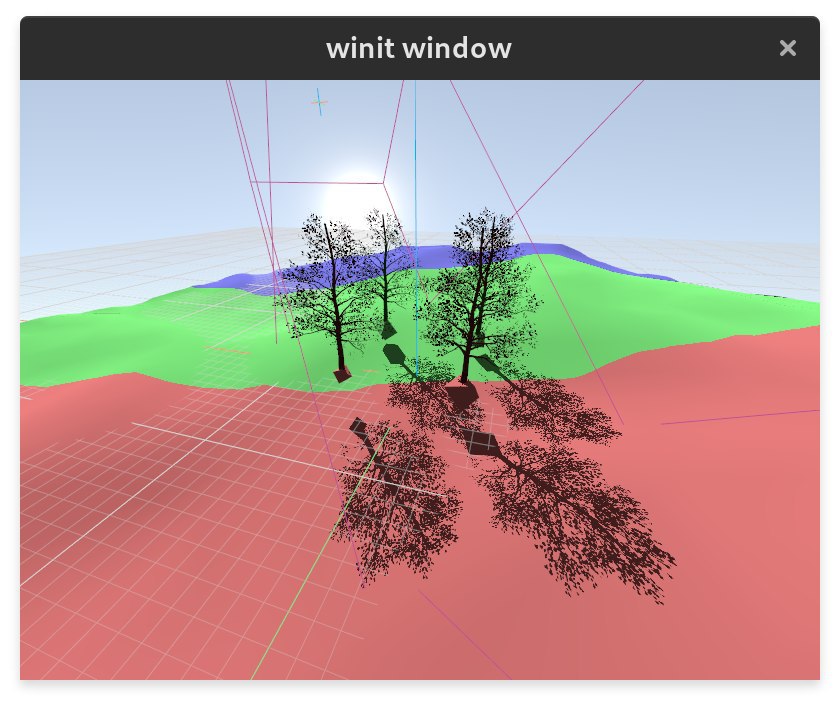
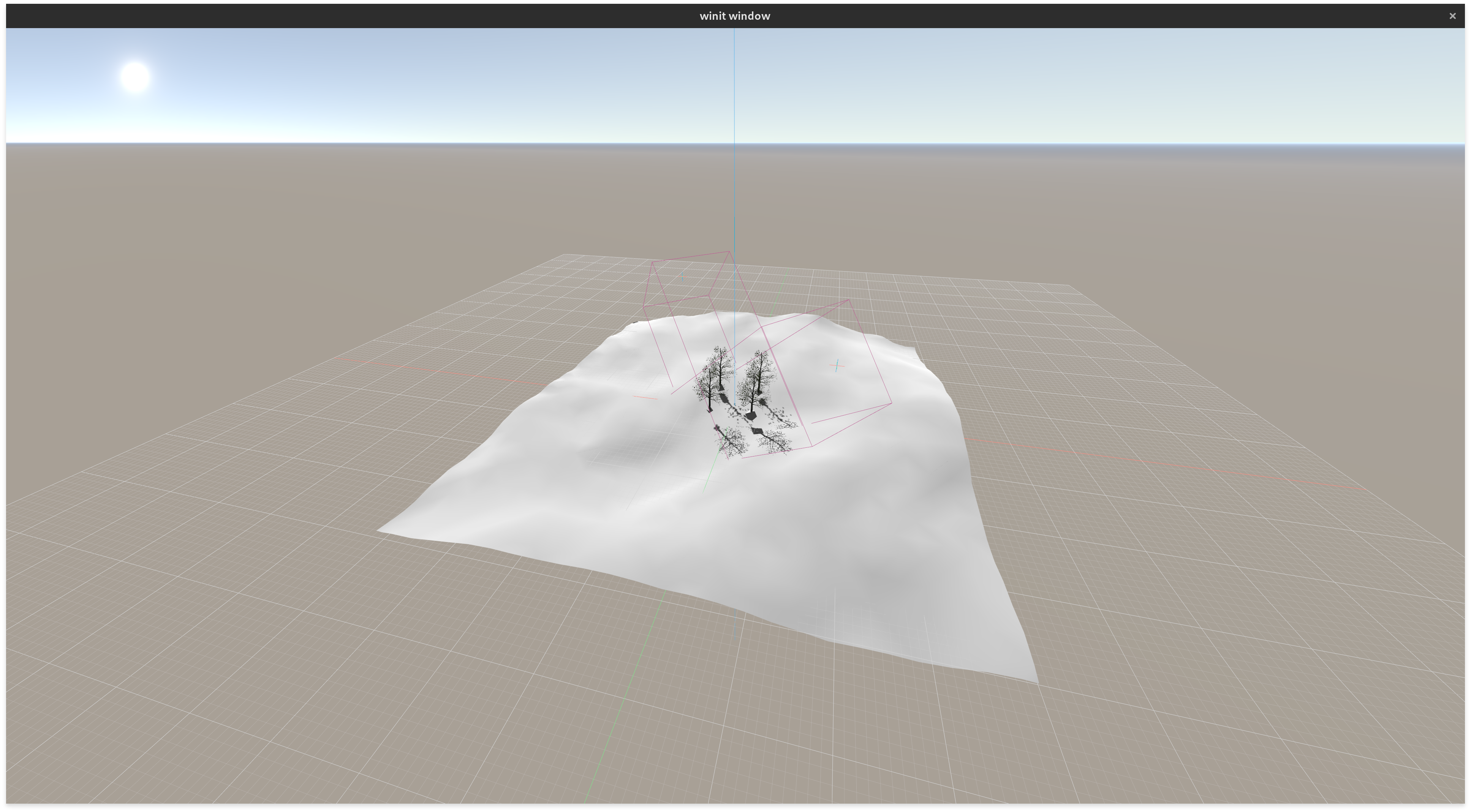
А я тем временем реализовал наивные каскадные тени
Size: a a a
L
L
L
L
AE
L
IS
rx), вращается и система координат. Поэтому, когда я пытаюсь вращать вдоль оси Y, вращается по локальной оси Y, а не глобальной.getTransforms().addAll(t, rx, ry, rz);
TG
rx), вращается и система координат. Поэтому, когда я пытаюсь вращать вдоль оси Y, вращается по локальной оси Y, а не глобальной.getTransforms().addAll(t, rx, ry, rz);
IS
public void rx(double angle) {
r = new Rotate(angle, px);
this.t = t.createConcatenation(r);
this.getTransforms().clear();
this.getTransforms().addAll(t);
}L
rx), вращается и система координат. Поэтому, когда я пытаюсь вращать вдоль оси Y, вращается по локальной оси Y, а не глобальной.getTransforms().addAll(t, rx, ry, rz);
IS
L
IS
rotateX = new Rotate(0.0, Rotate.X_AXIS),Это не норм?
rotateY = new Rotate(0.0, Rotate.Y_AXIS),
rotateZ = new Rotate(0.0, Rotate.Z_AXIS);
L
rotateX = new Rotate(0.0, Rotate.X_AXIS),Это не норм?
rotateY = new Rotate(0.0, Rotate.Y_AXIS),
rotateZ = new Rotate(0.0, Rotate.Z_AXIS);
IS
L
L
IS
I1