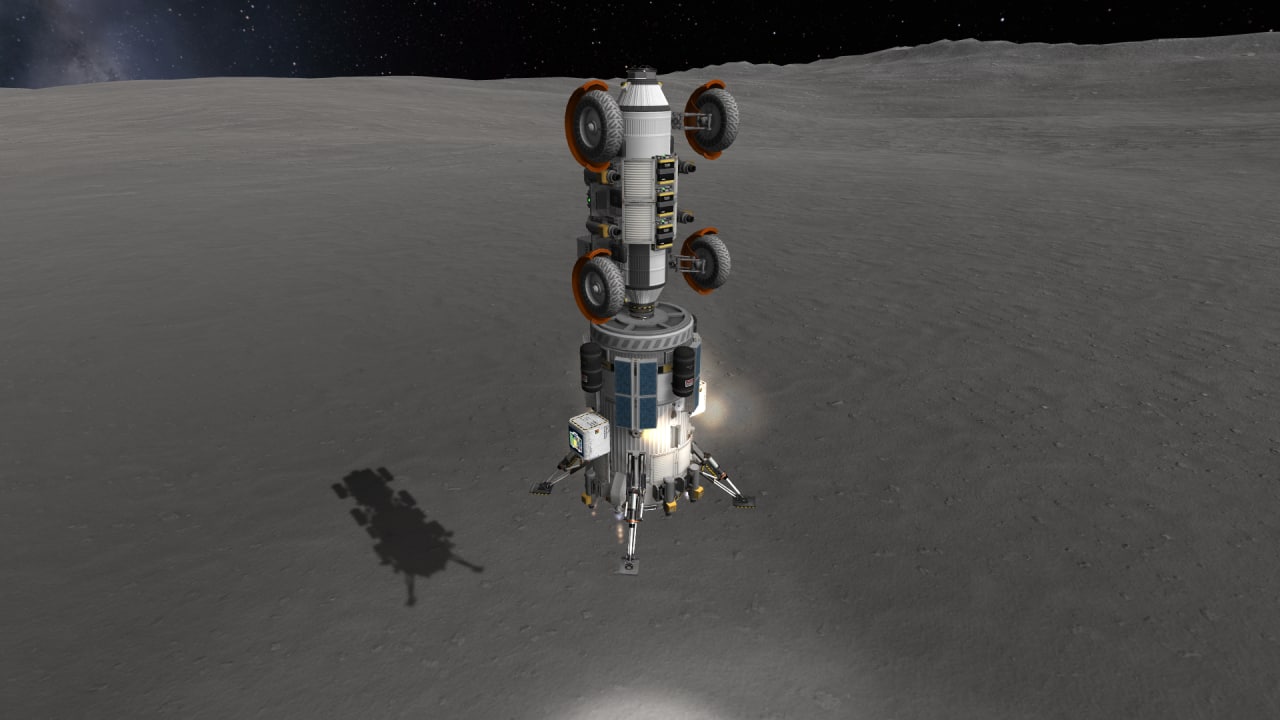
Не знал таких нюансов, побродив по докам, узнал.. оказывается ровер под своим весом полностью вытягивает троса скайкрана, на 7,5 м. После чего фиксируется т. н. "рывок" в конце и кран опускает ровер на поверхность, уменьшая тягу движков.
Затем срабатывают датчики полной посадки, кран зависает на несколько сек, дабы дать время перерезать трос-кабели. Встроенным пружинным мех-ом втягивает их, освобождая палубу тушки ровера.
Затем поднимается, поворачиваясь на ~50° и уносится пока не закончится топливо баке, минимизируя последствия падения на поверхность. (хотя скайкрана MSL, емнип, падал с остатками топлива).