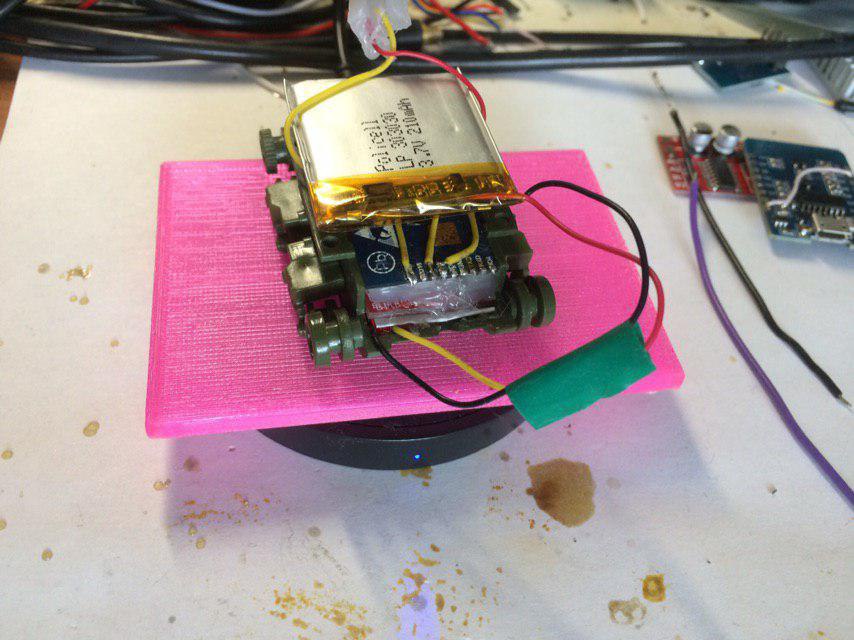
В аппарате на предыдущей фотографии для
поворота вокруг вертикальной оси используется тот же принцип, что и в популярных сейчас коптерах. Считаю, что вам интересно будет узнать, как это работает без использования рулей направления.
Если объяснять просто, то винт толкает воздух, а воздух этому сопротивляется. Это сопротивление передаётся на раму коптера, которая в воздухе ни за что не закреплена, и потому начинается вращаться в обратном пропеллеру направлении для компенсации сопротивления воздуха. Это называется
реактивным моментом винта.
Возьмём для примера коптер с четыремя пропеллерами. Два его пропеллера вращаются по часовой стрелке, и ещё два против часовой. Такая схема позволяет пропеллерам разного направления компенсировать реактивные моменты друг друга. Теперь, чтобы повернуть коптер
против часовой стрелки, нам нужно увеличить обороты винтов, вращающихся
по часовой стрелке, увеличивая их реактивный момент.