#medical_ксю
Медицинский робот из MITИнженеры из Массачусетского технологического института создали прототип гибкого робота для оперативного лечения тромбоза, аневризмы и других повреждений крупных сосудов.
Тромбоз артерий головного мозга и последующий инсульт являются одной из пяти главных причин смертности от сердечно-сосудистых заболеваний в мире. В среднем у врачей есть менее полутора часов от начала приступа, чтобы восстановить кровоток – иначе у пациента неминуемо возникнут тяжёлые (возможно – фатальные) повреждения мозга.
Гарантированно удалить кровяной сгусток можно только методами эндоваскулярной хирургии. Их же применяют для лечения аневризмы – патологического участка расширения, в котором происходит постепенное расслоение и разрыв артерии.
Проблема в том, что продвинутые методы сосудистой хирургии доступны только в крупных городах, но даже у ведущих профильных клиник часто не хватает свободных специалистов. Их подготовка занимает годы.
Удалять тромб вручную – крайне сложная процедура. Под контролем рентгеноскопии пациенту через бедренную или другую крупную артерию вводится тонкий катетер, по которому в область повреждения доставляются препараты, растворяющие тромб, или миниатюрные устройства для его механического разрушения и захвата.
Артериальное сосудистое русло головного мозга имеет сложную форму, катетер довольно жёсткий и обладает значительным трением, а все манипуляции выполняются в спешке. Совокупность этих факторов приводит к тому, что во время процедуры иногда возникают дополнительные повреждения.
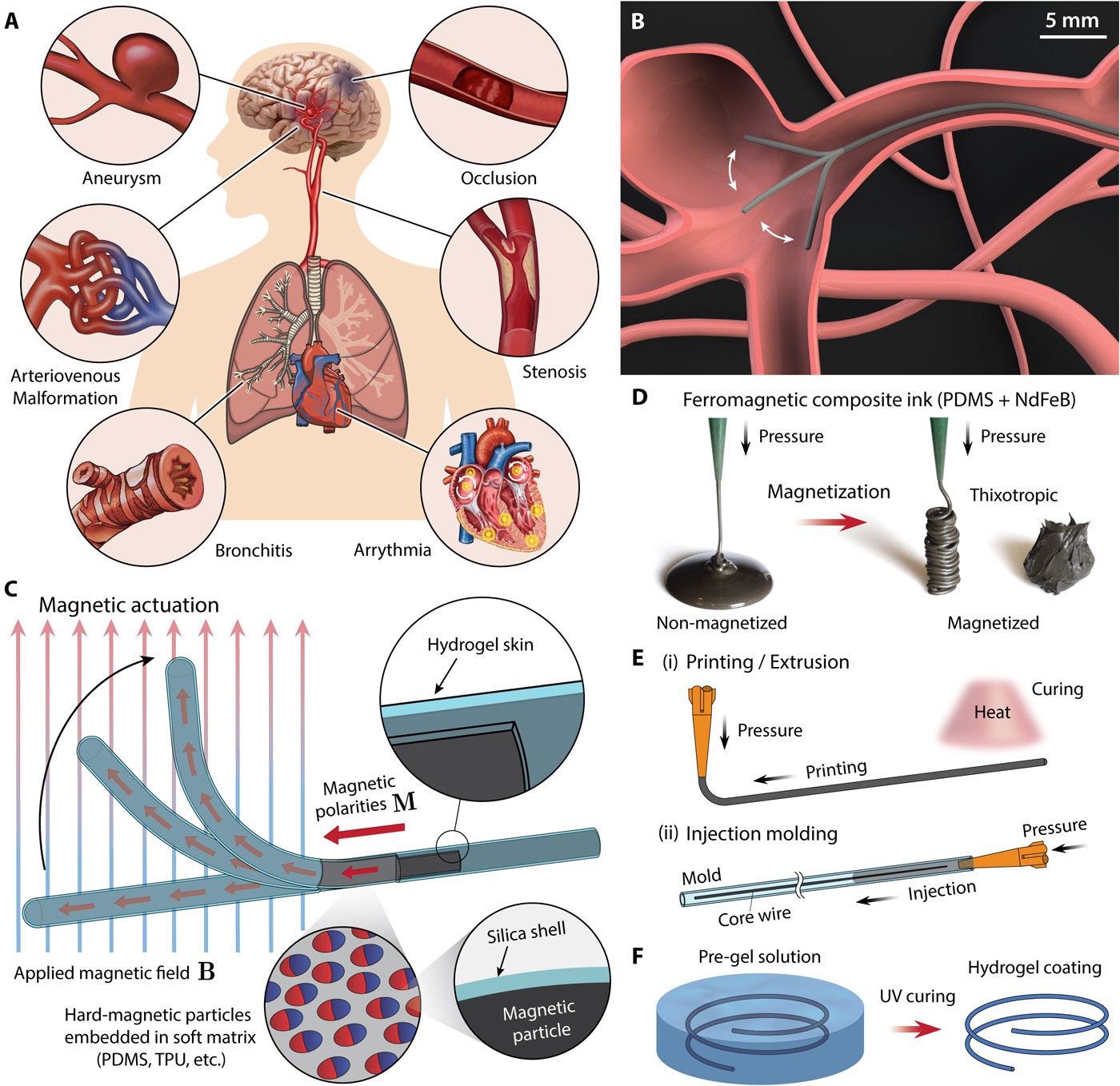
В MIT предложили использовать для этих целей медицинского робота с дистанционным управлением внешним магнитным полем. Его сердечник сделан из нитинола – это никель-титановый сплав, детали из которого обладают гибкостью и памятью формы.
Поверх сердечника нанесён слой резиноподобного вещества с вкраплёнными в него ферромагнитными частицами. Внешняя оболочка выполнена из гидрогеля, за счёт чего достигается высокая биосовместимость, низкий коэффициент трения и практически полная атравматичность процедур.
Прототип был опробован на силиконовой 3D-модели сосудов головного мозга и показал себя довольно перспективным: робот быстро проходил сложные участки за счёт легко контролируемого сгибания и возврата к исходной форме.
Вместо сложных ручных манипуляций хирург сможет управлять формой робота удалённо. Это снизит требования к уровню квалификации для оказания специализированной помощи, одновременно устраняя проблему облучения врачей при работе с рентгеновским оборудованием.
Источник: https://robotics.sciencemag.org/content/4/33/eaax7329@medicalksu