привет,
поставил 2209 с управлением по UART на 5го медведя по инструкции от Сергея
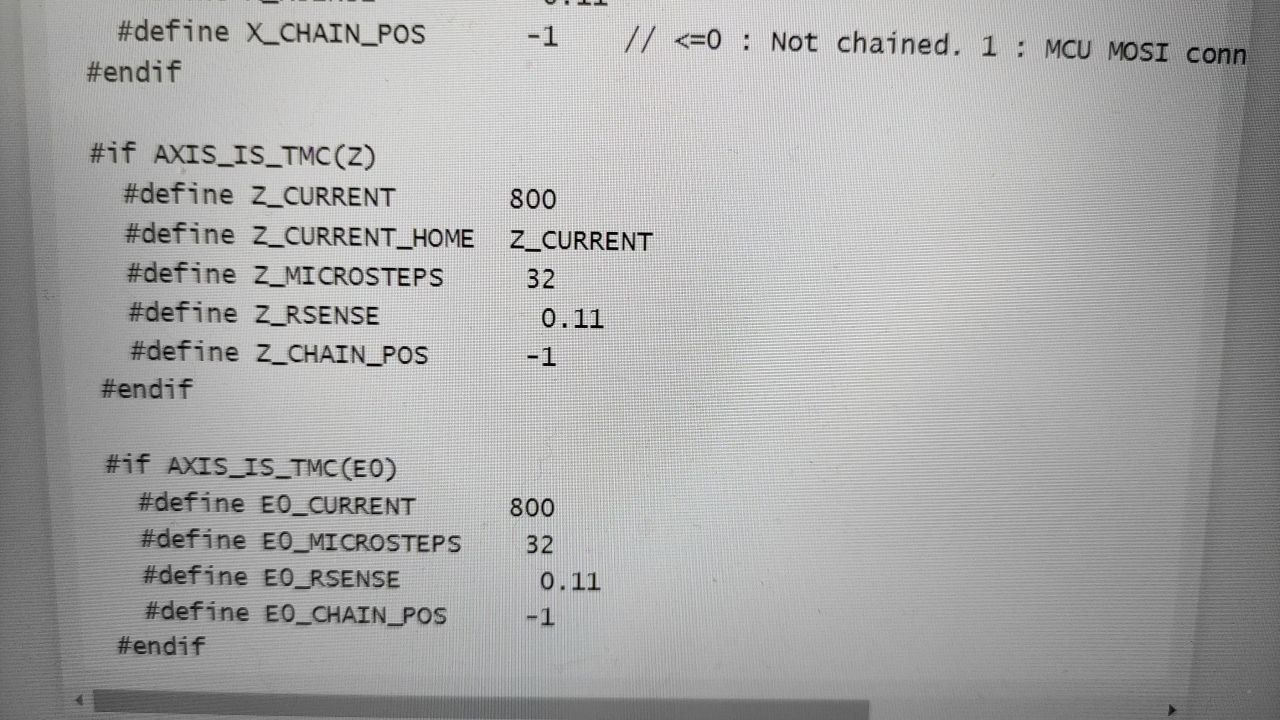
в DEFAULT_AXIS_STEPS_PER_UNIT и X_MICROSTEPS/Y_MICROSTEPS для Х и У значения одинаковы, но при этом по оси Х голова перемещается в 2 раза больше чем должна, хотя по У все нормально
подскажите куда копать, пожалуйста